Projects
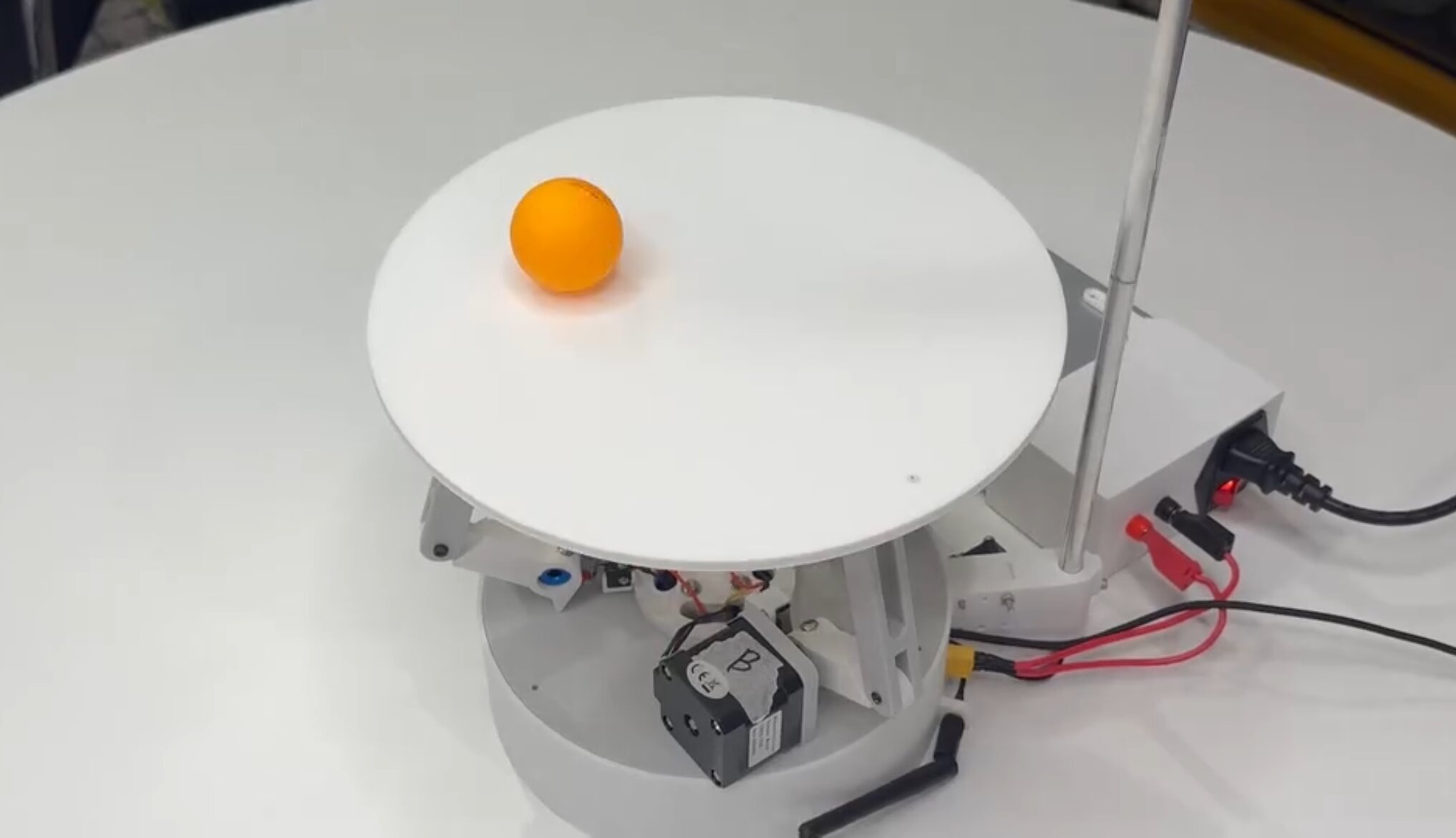
Ball Balancing Robot
ESP32
C++
Python
PID Control
Computer Vision
PCB Design
KiCad
Fusion 360
3D Printing
MATLAB
Created a high‑precision ball‑balancing robot using a custom 3RRS parallel manipulator, dual‑ESP32 control, and computer‑vision tracking, achieving a steady‑state error of under 1 mm from the target.
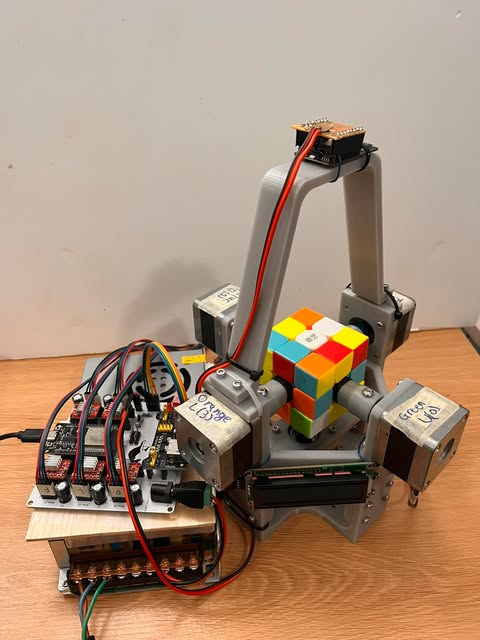
Rubik's Cube Solver
ESP32
C++
Python
Computer Vision
PCB Design
KiCad
Fusion 360
3D Printing
Created a high‑speed Rubik's Cube Solving Robot capable of automatically scanning and solving a Rubik's Cube in under 4 seconds